IGEL - Interactive and Generative Encouraged Locomotion
Das Projekt IGEL dient der Untersuchung der gleichzeitigen Steuerung von Robotik-Elementen durch mehrere Nutzer.
Dabei wird auf Smartphones als Eingabemedium zurückgegriffen, die über eine Website in Echtzeit individuelle Steuerimpulse an einen Server übermitteln. Dieser wiederum steuert über ein lokales WLAN die Formänderung des IGEL.
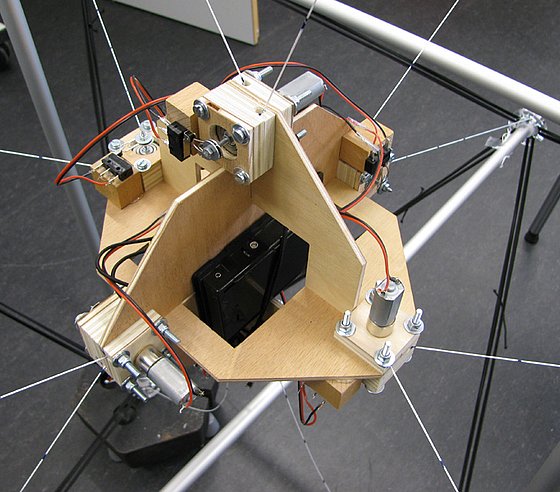
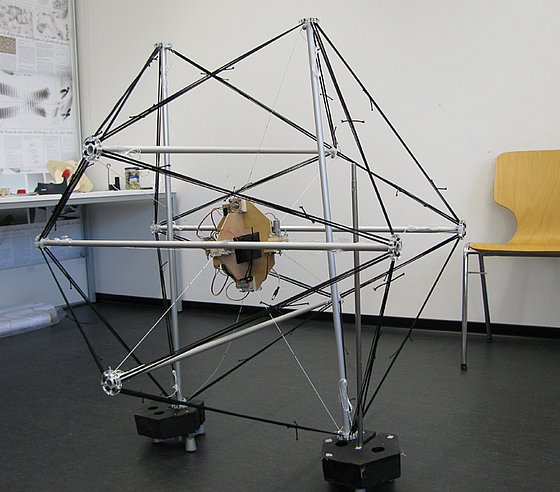
Konkret geht es um die Verzerrung einer Tensegrity-Struktur, die über 3x2 Motoren von drei Nutzern gemeinsam vorgenommen wird. Der IGEL ruht auf einer dreieckigen Fläche. Durch die Formänderung kommt es zur Verschiebung des Schwerpunktes, die zum Kippen des Objektes auf eine benachbarte Fläche führt. Auf diese Weise ist eine Fortbewegung durch Deformation möglich.
Server-Programm
Das Server-Programm läuft auf einem Rechner, der sich ebenfalls im (W)LAN befindet, zusammen mit dem IGEL und den Smartphones der Nutzer. Die Aufgabe des Servers ist es, die Kommunikation der Nutzer mit dem IGEL und die Aktualisierung der Benutzoberfläche zu koordinieren. Dabei findet keine direkte Steuerung durch Benutzereingaben statt, die Informationen werden zunächst vom Server entgegengenommen und in den Steuerungsablauf des IGELs übernommen, soweit sie der Steuerungslogik entsprechen.
Weitere Aufgabe des Servers ist es auch, die maximale Anzahl der Benutzer festzulegen und ihnen freie Slots zur Verfügung zu stellen. Es existiert ebenfalls eine Informationsschnittstelle, über die Zustand und Sensorwerte des IGELs abgefragt werden können.
Das Server-Script ist vollständig in Processing geschrieben.
Simulation
Bei der Konstruktion des IGELs stellt sich zunächst die Frage, inwiefern eine Fortbewegung durch Formänderung möglich ist. Die Verzerrung der grundlegenden Tensegrity-Konstruktion impliziert nicht automatisch eine günstige Verschiebung des Schwerpunkts, um ein Kippen zu "provozieren".
Diese Frage sollte zunächst mit einem virtuellen Modell untersucht werden. Dazu wurde innerhalb von Processing eine Umgebung mit Schwerkraft und einem Masse-Feder-System (traer.physics) generiert. Mit diesem Tool lassen sich erste Vermutungen über den Bewegungsablauf anstellen.
Prinzipmodell
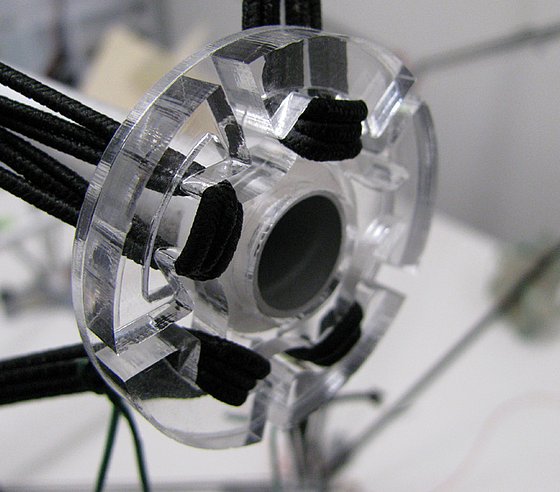
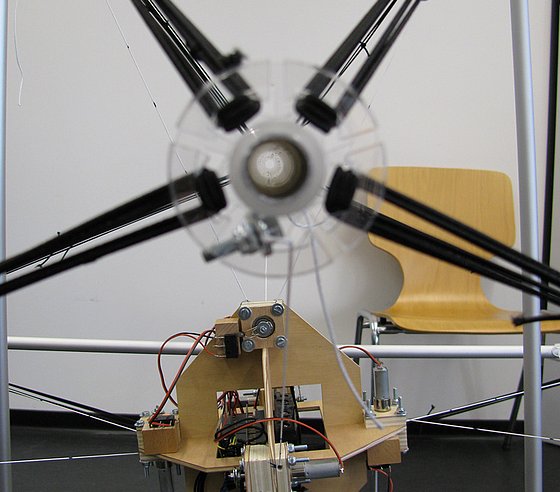
Als erster praktischer Test dient ein Modell im kleineren Maßstab. Im Zentrum ist eine einfache Windenkonstruktion mit einem LEGO-Motor angebracht, er verformt die Tensegrity-Struktur, indem ein Druckstabpaar gegeneinander verschoben wird.
Zunächst erfolgt der Test in hängender Position, um festzustellen, wie groß der Steuerstrom für den Motor sein muss. Der Motor arbeitet hierbei gegen die Spannung in der äußeren Seilkonstruktion. Ein Kräftegleichgewicht stellt sich ein.
Das Endmodell (d ~ 1 m) legt mit den eingesetzten Motoren ein trägeres Verhalten an den Tag. Allerdings sind die entstehenden Kräfte nicht gering, die Motoren arbeiten mit einem hohen Drehmoment (ca. 30 Nm). Nach bereits einem Tag traten an diversen Stellen Verschleißprobleme auf, die im Nachfolgemodell gelöst werden sollen.
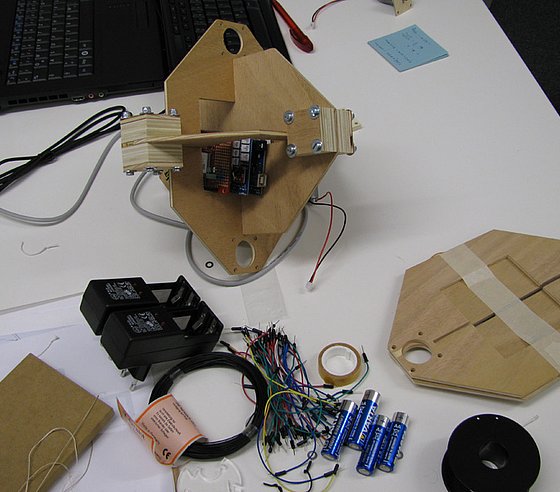
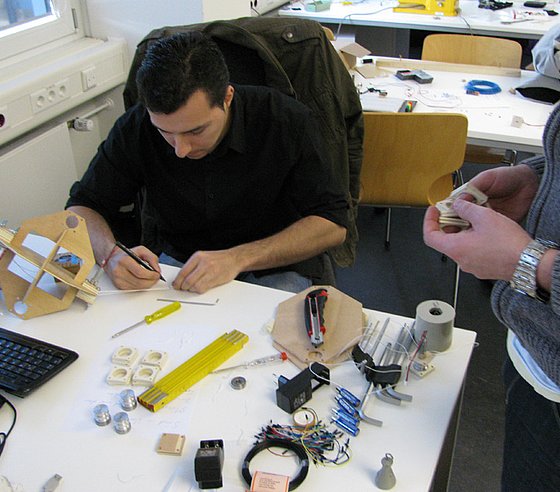
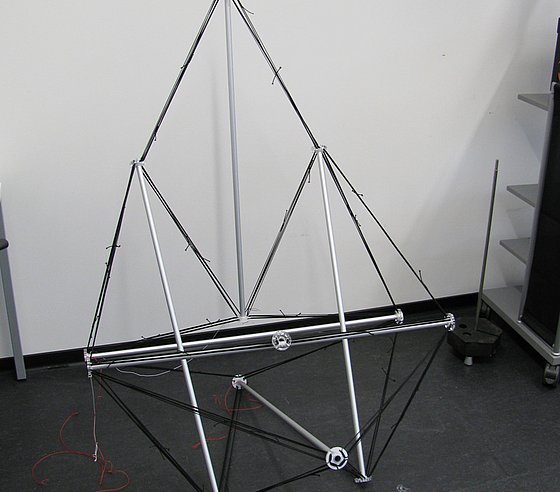
Bilder / Making of... IGEL
Visuelle Eindrücke aus der experimentellen Fertigungsphase des IGELs.





zuletzt bearbeitet am: 08.10.2020